
En el tema anterior" Clasificación de Motores Eléctricos" ;, expliqué los diferentes tipos de motor DC con Escobillas (BDC) que como en el siguiente diagrama:

Hoy, explicaré el motor de CC sin escobillas (BLDC) y los motores de inducción de CA de la siguiente manera.
Puede revisar los siguientes temas relacionados para su revisión y un buen seguimiento.
Componentes básicos de motores eléctricos
2- Motores DC sin escobillas
|
Motores DC sin escobillas |

En los motores de CC con escobillas, el conmutador mecánico y las escobillas asociadas son problemáticos por varias razones, como se indica a continuación:
Se produce desgaste de las escobillas y aumenta drásticamente en un entorno de baja presión.
Las chispas de los cepillos pueden causar explosiones si el ambiente contiene materiales explosivos.
El ruido de RF de los cepillos puede interferir con televisores o dispositivos electrónicos cercanos, etc.
Los motores de corriente continua sin escobillas (BLDC) son uno de los tipos de motores que están ganando popularidad rápidamente. Los motores BLDC se utilizan en industrias como electrodomésticos, automotriz, aeroespacial, de consumo, médica, equipos de automatización industrial e instrumentación.
Como su nombre lo indica, los motores BLDC no utilizan escobillas para la conmutación; en cambio, se conmutan electrónicamente.
Los motores BLDC tienen muchas ventajas sobre los motores DC con escobillas y los motores de inducción, algunas de ellas son:
Mejores características de velocidad en comparación con el par.
Alta respuesta dinámica.
Alta eficiencia.
Larga vida útil.
Funcionamiento silencioso.
Rangos de velocidad más altos.
Además, la relación entre el par entregado y el tamaño del motor es mayor, lo que lo hace útil en aplicaciones donde el espacio y el peso son factores críticos.
Construcción
Los motores BLDC son un tipo de motor síncrono. Esto significa que el campo magnético generado por el estator y el campo magnético generado por el rotor gira a la misma frecuencia.
Los motores BLDC vienen en configuraciones monofásicas, bifásicas y trifásicas. Según su tipo, el estator tiene el mismo número de devanados. De estos, los motores trifásicos son los más populares y ampliamente utilizados.
1- estator
|
El estator de un motor BLDC |

El estator de un motor BLDC consta de láminas de acero apiladas con devanados colocados en las ranuras que se cortan axialmente a lo largo de la periferia interior.
La mayoría de los motores BLDC tienen tres devanados de estator conectados en estrella. Cada uno de estos devanados está construido con numerosas bobinas interconectadas para formar un devanado. Se colocan una o más bobinas en las ranuras y se interconectan para formar un devanado. Cada uno de estos devanados se distribuye sobre la periferia del estator para formar un número par de polos.
Dependiendo de la capacidad de la fuente de alimentación de control, se puede elegir el motor con la tensión nominal correcta del estator. Los motores con voltaje de cuarenta y ocho voltios o menos se utilizan en automoción, robótica, movimientos de brazos pequeños, etc. Los motores con 100 voltios o valores nominales superiores se utilizan en electrodomésticos, automatización y aplicaciones industriales.
2- Rotor
|
El rotor de un motor BLDC |

El rotor está hecho de un imán permanente y puede variar de dos a ocho pares de polos con polos alternos norte (N) y sur (S).
|
Posiciones del imán del rotor BLDC |
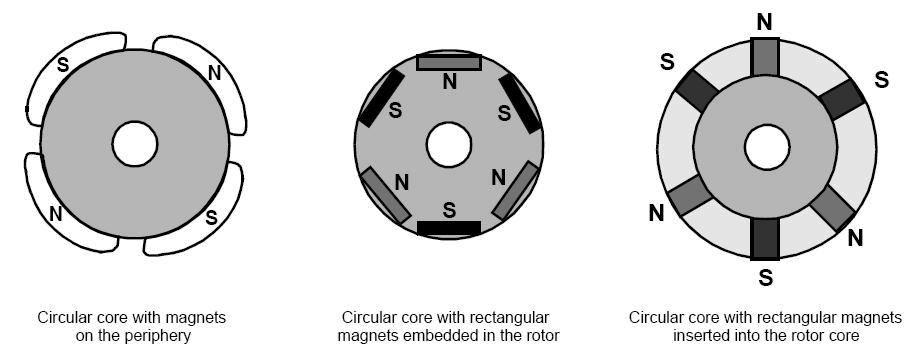
En función de la densidad de campo magnético requerida en el rotor, se elige el material magnético adecuado para fabricar el rotor. Los imanes de ferrita se utilizan tradicionalmente para fabricar imanes permanentes.
3- Sensores Hall
|
Sensores de pasillo BLDC |
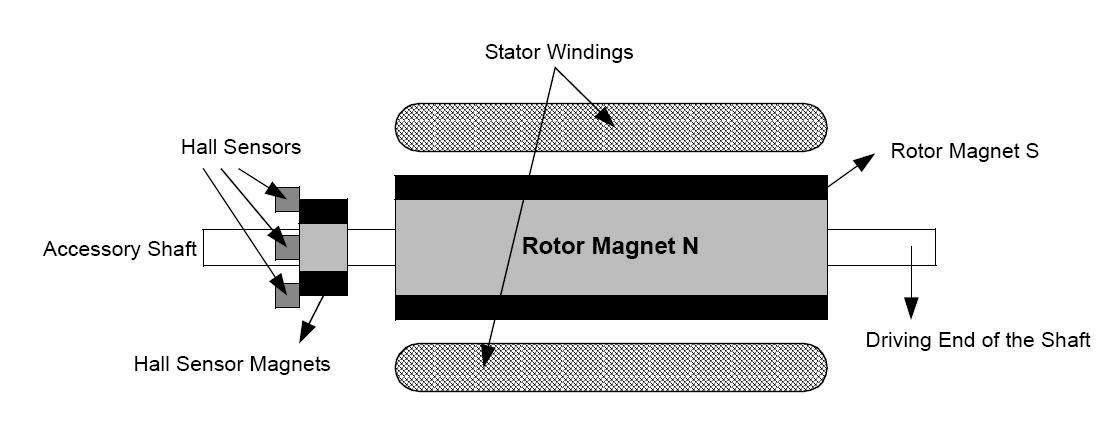
A diferencia de un motor de CC con escobillas, la conmutación de un motor BLDC se controla electrónicamente. Para rotar el motor BLDC, los devanados del estator deben energizarse en una secuencia. Es importante conocer la posición del rotor para comprender qué devanado se activará siguiendo la secuencia de activación. La posición del rotor se detecta mediante sensores de efecto Hall integrados en el estator.
La mayoría de los motores BLDC tienen tres sensores Hall integrados en el estator en el extremo no impulsor del motor.
Siempre que los polos magnéticos del rotor pasan cerca de los sensores Hall, dan una señal alta o baja, lo que indica que el polo N o S pasa cerca de los sensores. Basándose en la combinación de estas tres señales de sensor Hall, se puede determinar la secuencia exacta de conmutación.
Según la posición física de los sensores Hall, existen dos versiones de salida. Los sensores Hall pueden tener un cambio de fase de 60 ° o 120 ° entre sí. En base a esto, el fabricante del motor define la secuencia de conmutación que se debe seguir al controlar el motor.
Nota: Los sensores Hall requieren una fuente de alimentación. El voltaje puede oscilar entre 4 voltios y 24 voltios. La corriente requerida puede variar de 5 a 15 paperas.
teoría de operación
Cada secuencia de conmutación tiene uno de los devanados energizado a potencia positiva (la corriente entra en el devanado), el segundo devanado es negativo (la corriente sale del devanado) y el tercero está en una condición no energizada.
El par se produce debido a la interacción entre el campo magnético generado por las bobinas del estator y los imanes permanentes del rotor.
Para mantener el motor en funcionamiento, el campo magnético producido por los devanados debe cambiar de posición a medida que el rotor se mueve para alcanzar el campo del estator. Lo que se conoce como "conmutación de seis pasos" define la secuencia de activación de los devanados.
En una conmutación de seis pasos, solo se utilizan dos de los tres devanados del motor de CC sin escobillas a la vez. Los pasos equivalen a 60 grados eléctricos, por lo que seis pasos hacen una rotación completa de 360 grados. Un bucle completo de 360 grados puede controlar la corriente porque solo hay una ruta de corriente. La conmutación de seis pasos suele ser útil en aplicaciones que requieren alta velocidad y frecuencias de conmutación. Un motor de CC sin escobillas de seis pasos generalmente tiene una menor eficiencia de par que un motor conmutado de onda sinusoidal.
Aplicaciones típicas de motores BLDC
Podemos clasificar el tipo de control de motor BLDC en tres tipos principales:
Carga constante.
Cargas variables.
Aplicaciones de posicionamiento.
1- Aplicaciones con cargas constantes:
Estos son los tipos de aplicaciones en las que una velocidad variable es más importante que mantener la precisión de la velocidad a una velocidad establecida. Además, las tasas de aceleración y desaceleración no cambian dinámicamente. En este tipo de aplicaciones, la carga se acopla directamente al eje del motor.
Por ejemplo, los ventiladores, bombas y sopladores se incluyen en este tipo de aplicaciones. Estas aplicaciones exigen controladores de bajo costo, la mayoría operando en lazo abierto.
2- Aplicaciones con cargas variables:
Estos son los tipos de aplicaciones en las que la carga del motor varía en un rango de velocidad. Estas aplicaciones pueden exigir precisión de control de alta velocidad y buenas respuestas dinámicas.
Por ejemplo,
Electrodomésticos: lavadoras, secadoras y compresores.
En automoción, control de bombas de combustible, control de dirección electrónica, control de motor y control de vehículos eléctricos.
En el sector aeroespacial, existen varias aplicaciones, como centrifugadoras, bombas, controles de brazo robótico, controles de giroscopio, etc.
Estas aplicaciones pueden utilizar dispositivos de retroalimentación de velocidad y pueden ejecutarse en un circuito semicerrado o en un circuito cerrado total.
3- Aplicaciones de posicionamiento:
La mayoría de los tipos de aplicaciones industriales y de automatización pertenecen a esta categoría. Las aplicaciones en esta categoría tienen algún tipo de transmisión de potencia, que pueden ser engranajes mecánicos o correas temporizadoras, o un simple sistema accionado por correa. En estas aplicaciones, la respuesta dinámica de velocidad y par es importante. Además, estas aplicaciones pueden tener una inversión frecuente de la dirección de rotación.
Estos sistemas operan principalmente en circuito cerrado.
Finalmente, una comparación entre un motor de CC con escobillas (BDC) y un motor de CC sin escobillas (BLDC) se muestra en la siguiente imagen.

Segundo: motores de CA
Los motores de corriente alterna (CA) utilizan una corriente eléctrica, que invierte su dirección a intervalos regulares.
La principal ventaja de los motores de CC sobre los motores de CA es que la velocidad es más difícil de controlar para los motores de CA. Para compensar esto, los motores de CA pueden equiparse con variadores de frecuencia, pero el control de velocidad mejorado se combina con una calidad de energía reducida.
Tipos de motores de CA:

Los motores de CA de uso común en la actualidad se pueden dividir en dos categorías amplias:
Motores de inducción (asíncronos).
Motores síncronos.
Motores lineales.
Estos dos tipos de motores difieren en cómo se suministra la excitación del campo del rotor de la siguiente manera:
Para los motores de inducción, no hay excitación del rotor aplicada externamente y, en cambio, se induce corriente en los devanados del rotor debido al campo magnético del estator giratorio.
Para motores síncronos, se aplica una excitación de campo a los devanados del rotor. Esta diferencia en la excitación de campo conduce a diferencias en las características del motor, lo que a su vez conduce a diferentes requisitos de protección y control para cada tipo de motor.
1- Motor de inducción
Los motores de inducción son los motores más comunes que se utilizan para varios equipos en la industria.
Motor de inducción: Se llama así porque el voltaje se induce en el rotor (por lo tanto, no se necesitan escobillas), pero para que esto suceda, el rotor debe girar a una velocidad menor el campo magnético para permitir la existencia de un voltaje inducido.
Por lo tanto, se necesita un nuevo término para describir el motor de inducción que es el deslizamiento.
El deslizamiento:
Un par motor solo puede existir si hay una corriente inducida en el anillo de sombreado. Está determinado por la corriente en el anillo y solo puede existir si hay una variación de flujo en el anillo. Por lo tanto, debe haber una diferencia de velocidad en el anillo de sombreado y el campo giratorio. Esta es la razón por la que un motor eléctrico que funciona según el principio descrito anteriormente se denomina "motor asíncrono".
La diferencia entre la velocidad síncrona (Ns) y la velocidad del anillo de sombreado (N) se denomina "deslizamiento" (s) y se expresa como un porcentaje de la velocidad síncrona.
S=(Nsyn - Nm) / Nsyn
¿Dónde está el resbalón? El deslizamiento es una de las variables más importantes en el control y funcionamiento de las máquinas de inducción.
s=0: si el rotor funciona a velocidad síncrona.
s=1: si el rotor está parado.
s es –ve: si el rotor funciona a una velocidad superior a la velocidad síncrona.
s es + ve: si el rotor funciona a una velocidad por debajo de la velocidad síncrona.
Ventajas:
Diseño simple, robusto, económico y de fácil mantenimiento.
Amplia gama de potencias nominales: potencia fraccionada hasta 10 MW.
Funciona esencialmente a una velocidad constante desde sin carga hasta carga completa.
Su velocidad depende de la frecuencia de la fuente de energía.
El motor más popular hoy en día en el rango de potencia baja y media.
Muy robusto en construcción.
Se han reemplazado los motores de CC en áreas donde los motores de CC tradicionales no se pueden usar, como entornos mineros o explosivos. De dos tipos, según la construcción del motor; Jaula de ardilla o anillo colector.
Desventajas:
No es fácil tener control de velocidad variable.
Requiere un accionamiento electrónico de potencia de frecuencia variable para un control de velocidad óptimo.
La mayoría de ellos funcionan con un factor de potencia rezagado.
Principio de funcionamiento:
El estator generalmente está conectado a la red y, por lo tanto, el estator está magnetizado.
El campo magnético del estator corta los devanados del rotor y produce un voltaje inducido en los devanados del rotor.
Debido a que los devanados del rotor están en cortocircuito, tanto para la jaula de ardilla como para el rotor bobinado, y la corriente inducida fluye en los devanados del rotor.
La corriente del rotor produce otro campo magnético.
El par se produce como resultado de la interacción de esos dos campos magnéticos.
Construcción:
Un motor de inducción tiene dos partes principales
1- estator
|
Estator del motor de inducción |

Esta es la parte inmóvil del motor. Un cuerpo de hierro fundido o una aleación ligera aloja un anillo de placas delgadas de acero al silicio (alrededor de 0,5 mm de espesor). Las placas están aisladas entre sí por oxidación o un barniz aislante. La “laminación” del circuito magnético reduce las pérdidas por histéresis y corrientes parásitas.
Las placas tienen muescas para los devanados del estator que producirán el campo giratorio para encajar (tres devanados para un motor trifásico). Cada devanado está formado por varias bobinas. La forma en que se unen las bobinas determina el número de pares de polos en el motor y, por lo tanto, la velocidad de rotación.
2- Rotor
Esta es la parte móvil del motor. Al igual que el circuito magnético del estator, consta de placas apiladas aisladas entre sí y formando un cilindro encajado en el eje del motor.
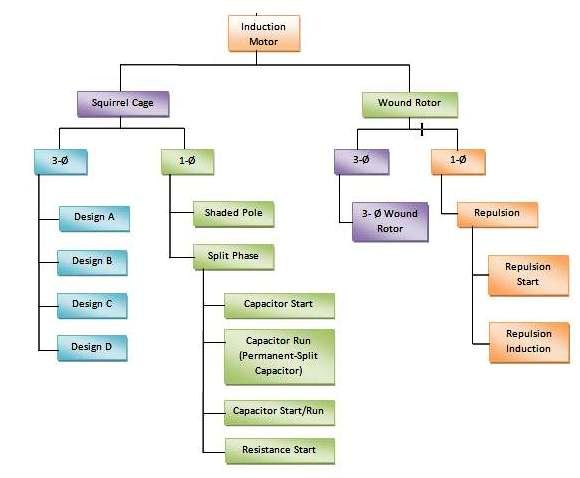
Tipos de motores de inducción
|
Tipos de motores de inducción |
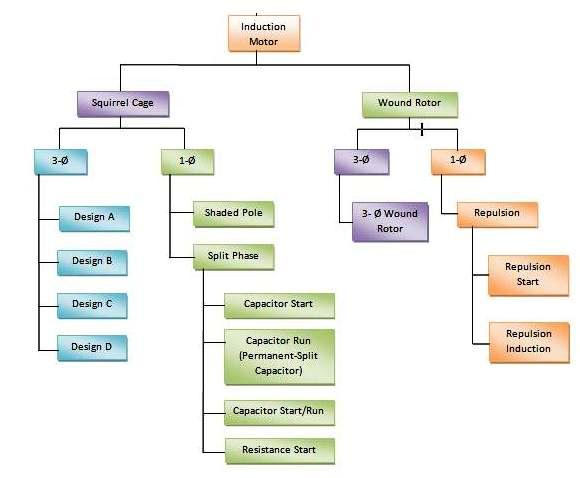
Los motores de inducción se clasifican según el tipo de rotor de la siguiente manera:
A- Rotor de jaula de ardilla:
|
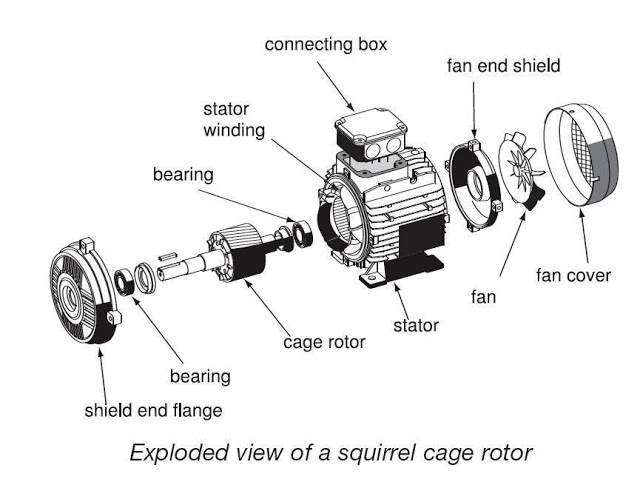
Rotor de jaula de ardilla |
Consiste en barras conductoras gruesas incrustadas en ranuras paralelas. Estas barras se cortocircuitan en ambos extremos mediante anillos de cortocircuito.
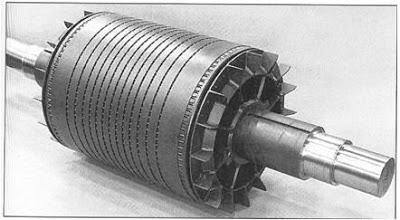
B- Rotor de herida:
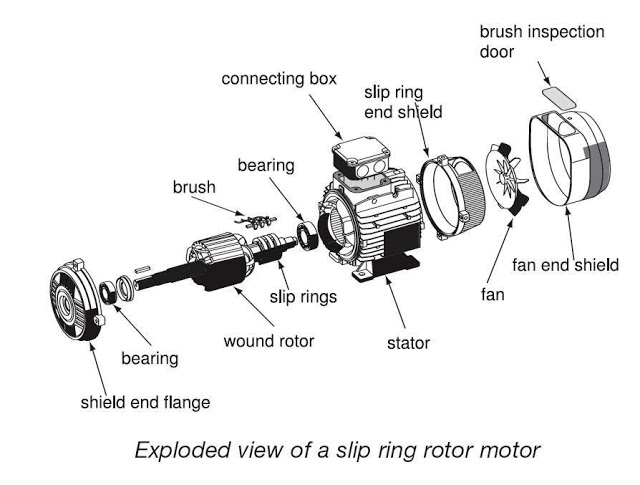
|
Rotor de heridas |
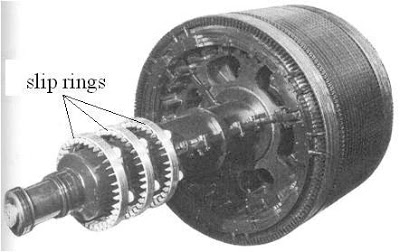
Tiene un devanado distribuido trifásico, de doble capa. Está enrollado por tantos polos como el estator. Las tres fases están cableadas internamente y los otros extremos están conectados a anillos deslizantes montados en un eje con cepillos apoyados sobre ellos.
Cada uno de los dos tipos de motores de inducción anteriores se puede clasificar en dos grupos principales de la siguiente manera:
I- Motores de inducción monofásicos:
Estos solo tienen un devanado de estator, funcionan con una fuente de alimentación monofásica, tienen un rotor de jaula de ardilla y requieren un dispositivo para arrancar el motor. Este es, con mucho, el tipo de motor más común utilizado en electrodomésticos, como ventiladores, lavadoras y secadoras de ropa, y para aplicaciones de hasta 3 a 4 caballos de fuerza.
Los motores de inducción monofásicos también vienen con un rotor bobinado que tiene excelentes características de arranque y aceleración, y son ideales para operadores económicos, aplicaciones de motores agrícolas, polipastos, máquinas de mantenimiento de pisos, compresores de aire, equipos de lavandería y equipos de minería.
II- Motores de inducción trifásicos:
El campo magnético giratorio es producido por el suministro trifásico balanceado. Estos motores tienen capacidades de alta potencia, pueden tener rotores de jaula de ardilla o bobinados (aunque el 90% tiene un rotor de jaula de ardilla) y son de arranque automático. Se estima que alrededor del 70% de los motores en la industria son de este tipo, se utilizan, por ejemplo, en bombas, compresores, cintas transportadoras, redes eléctricas de servicio pesado y trituradoras. Están disponibles en clasificaciones de 1/3 a cientos de caballos de fuerza.
Ahora, veamos la primera clasificación de motores de inducción basada en los tipos anteriores:
1- Monofásico, jaula de ardilla, motor de inducción:
Esta categoría tiene muchos tipos, como se muestra en la siguiente imagen.
A- Motores de inducción de polos sombreados
Principio de construcción y funcionamiento:
|
Motores de inducción de polos sombreados |
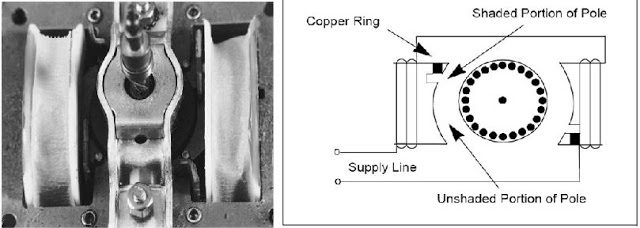
Los motores de polos sombreados tienen un solo devanado principal y no tienen devanado de arranque. Para comenzar, se utiliza un diseño que forma un bucle de cobre continuo alrededor de una pequeña parte de cada uno de los polos del motor. Esto "sombrea" esa parte del polo, lo que hace que el campo magnético en el área sombreada se quede atrás del campo en el área no sombreada. La reacción de los dos campos hace que el eje gire.
Ventajas:
Debido a que el motor de polo sombreado carece de devanado de arranque, interruptor de arranque o condensador, es eléctricamente simple y económico.
La velocidad se puede controlar simplemente variando el voltaje o mediante un devanado de múltiples tomas.
Mecánicamente, la construcción del motor de polos sombreados permite una producción de alto volumen.
Por lo general, estos se consideran motores "desechables", lo que significa que son mucho más baratos de reemplazar que de reparar.
Desventajas:
Su par de arranque bajo es típicamente del 25% al 75% del par nominal.
Es un motor de alto deslizamiento con una velocidad de funcionamiento del 7% al 10% por debajo de la velocidad síncrona.
Generalmente, la eficiencia de este tipo de motor es muy baja (por debajo del 20%).
Aplicaciones:
El bajo costo inicial se adapta a los motores de polos sombreados para aplicaciones de baja potencia o de servicio liviano. Quizás su mayor uso sea en ventiladores de varias velocidades para uso doméstico. Pero el bajo par, la baja eficiencia y las características mecánicas menos resistentes hacen que los motores de polos sombreados no sean prácticos para la mayoría de los usos industriales o comerciales, donde las tasas de ciclo más altas o el servicio continuo son la norma.
En el próximo tema, continuaré explicando otros tipos de motores de inducción monofásicos de jaula de ardilla.





